美国国防部近日公开了《无人系统综合路线图(2017-2042)》,这是美国自2001年以来发布的第8版无人机/无人系统综合路线图,用于指导美军用无人机、无人潜航器、无人水面艇、无人地面车辆等的全面发展。新版《无人系统综合路线图》强调,为适应未来联合作战需求,无人系统应聚焦全域作战,而非特定作战域,相关技术应支撑跨域指控、跨域通信以及与联合部队的集成。新版《无人系统综合路线图》指出,互操作性、自主性、安全网络、人机协同是加速无人系统作战应用的4大驱动力。

在推迟了一年之后,美国国防部终于公开了《无人系统综合路线图(2017-2042)》
这份由负责采购的国防部长助理Kevin Fabey和负责研究与工程的国防部长助理Mary Miller批准的将近60页的报告概述了美国防部计划在未来25年内如何在无人系统中增加开放式架构和模块化的使用,首先是扩大其在指挥和控制中的使用,并使用更多的模块化子系统来加快平台通过批准使用。
目前无人系统在美国防部的组织机构里随处可见。虽然出现最多的无人驾驶载具与空军关系密切,但是远程控制的机器人遍布陆军的每个分支,并用于所有战斗指挥。
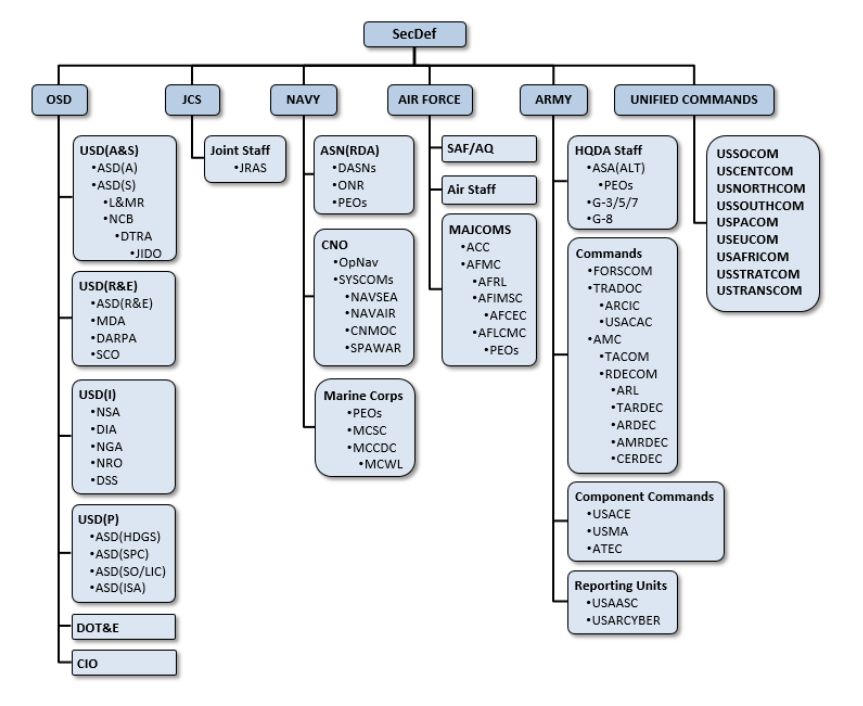
涉及无人系统的国防部组织
2018财年国防授权法案包含了有史以来最大的无人机和机器人预算,这标志着现代战争涉及这些机器的程度有多深。美国防部的无人系统愿景是:国防部设想无人系统与有人系统无缝协作,以压缩作战人员的决策过程,同时降低人员生命危险。
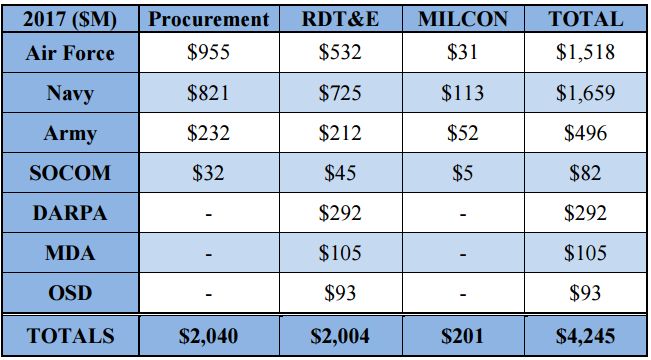
美国防部无人系统2017财年投资数(百万美元)
报告旨在提供“总体战略指导”,以使各军种无人系统的目标和努力方向与国防部的战略愿景保持一致。它还寻求减少重复工作,促进合作,确定挑战并概述国防部与行业可以合作扩大无人系统潜力的主要领域。
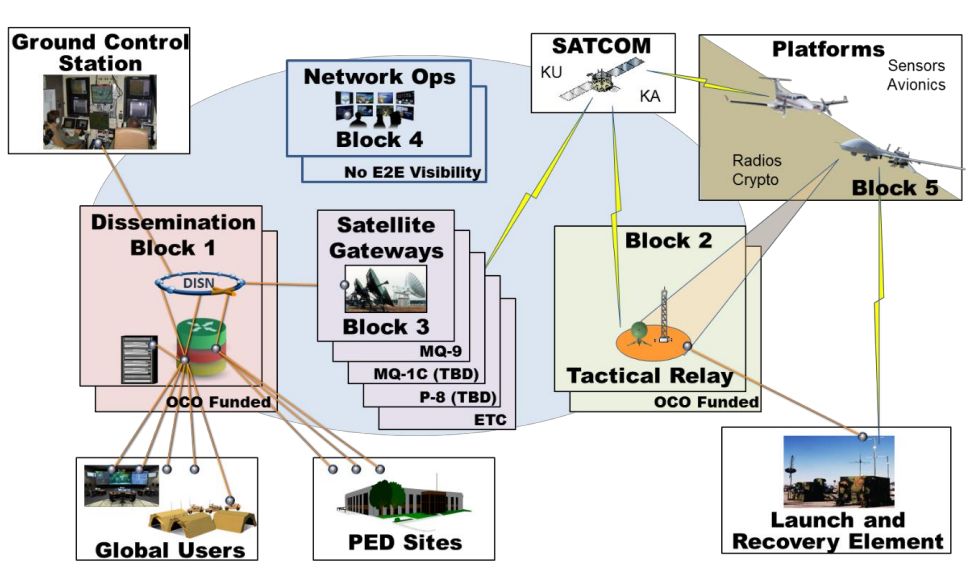
无人系统ISR数据传输能力
该报告将主要的无人系统问题分为四个主题,强调了未来的问题、挑战、机遇和方法,这四个主题分别是:互操作性、自主性、安全网络和人机协作。
互操作性――互操作性在历史上一直是,并将继续成为无人系统集成和运行的主要推动力。有人和无人系统越来越多地协调其能力,重点关注使用开放和通用架构的关键需求。强大的可互操作基础提供了一种结构,可以在未来的作战中取得进展。
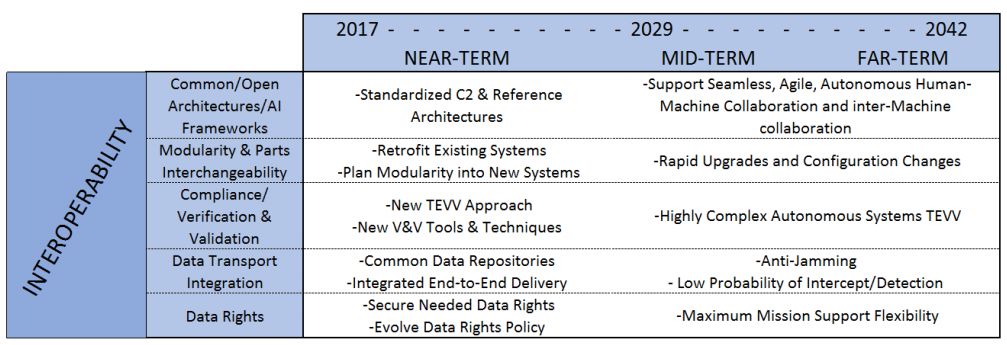
互操作性综合路线图
自主性――自主性和机器人技术的进步作为重要的力量倍增器,有可能彻底改变作战概念。自主性将极大地提高有人和无人系统的效率和效益,为国防部提供战略优势。
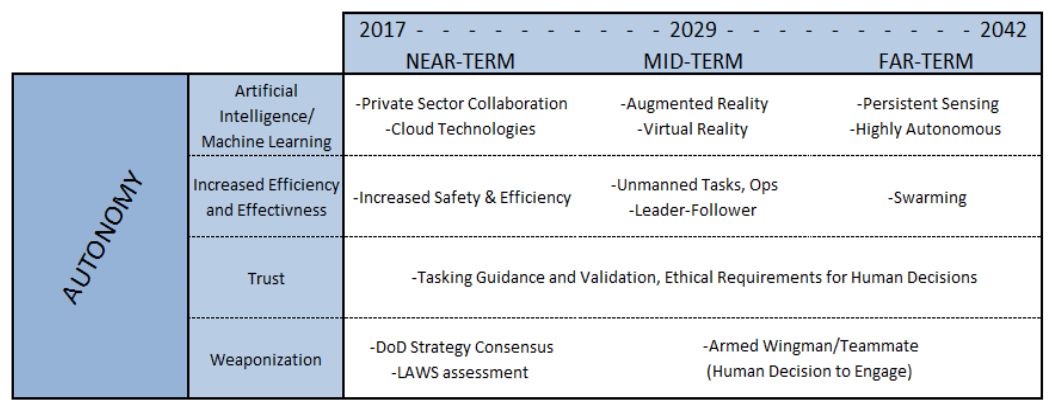
自主性综合路线图
安全网络――无人系统操作通常依赖于网络连接和有效的频谱访问。美军必须在未来战场解决网络漏洞以防止己方无人系统被干扰或操纵。
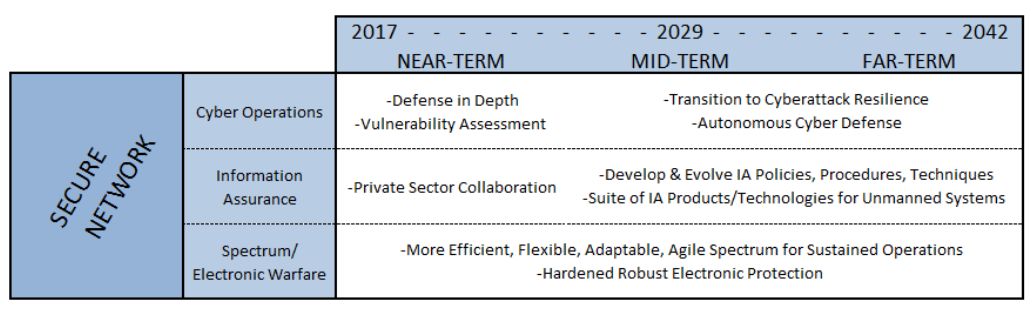
安全网络综合路线图
人机协同――如果互操作性奠定了基础,那么人机协同就是最终目标。人和机器之间的组合将实现革命性的协同,在这个团队中,机器将被视为关键的队友。

人机协同综合路线图
|















